|
PLUTO
|
Header file for GLM Divergence Cleaning. More...
Go to the source code of this file.
Macros | |
| #define | GLM_MHD |
| #define | GLM_ALPHA 0.1 |
| Sets the damping rate of monopoles. More... | |
| #define | GLM_EXTENDED NO |
| The GLM_EXTENDED macro may be turned to YES to enable the extended GLM formalism. More... | |
| #define | COMPUTE_DIVB NO |
Functions | |
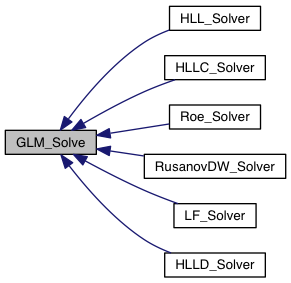
| void | GLM_Solve (const State_1D *, double **, double **, int, int, Grid *) |
| void | GLM_SolveNEW (const State_1D *state, int beg, int end, Grid *grid) |
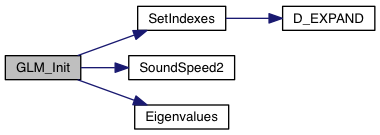
| void | GLM_Init (const Data *, const Time_Step *, Grid *) |
| void | GLM_Source (const Data_Arr, double, Grid *) |
| void | GLM_ExtendedSource (const State_1D *, double, int, int, Grid *) |
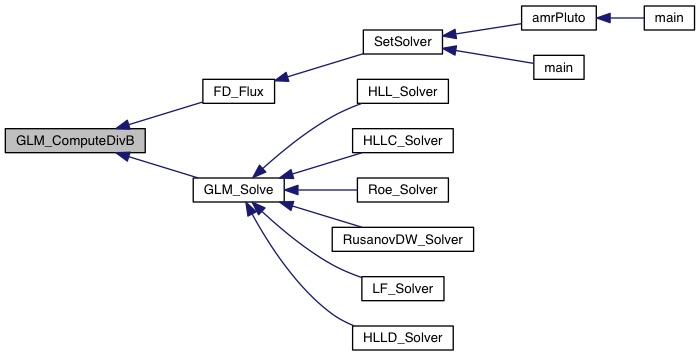
| void | GLM_ComputeDivB (const State_1D *state, Grid *grid) |
| double *** | GLM_GetDivB (void) |
Variables | |
| double | glm_ch |
| The propagation speed of divergence error. More... | |
Header file for GLM Divergence Cleaning.
Contains function prototypes and global variable declaration for the GLM formulation to control the divergence-free condition of magnetic field.
References
Definition in file glm.h.
| #define GLM_EXTENDED NO |
Definition at line 411 of file glm.c.

Add source terms to the right hand side of the conservative equations, momentum and energy equations only. This yields the extended GLM equations given by Eq. (24a)–(24c) in
"Hyperbolic Divergence cleaning for the MHD Equations" Dedner et al. (2002), JcP, 175, 645
Definition at line 168 of file glm.c.


| double*** GLM_GetDivB | ( | void | ) |
Initialize the maximum propagation speed glm_ch.
Definition at line 324 of file glm.c.

| void GLM_Solve | ( | const State_1D * | state, |
| double ** | VL, | ||
| double ** | VR, | ||
| int | beg, | ||
| int | end, | ||
| Grid * | grid | ||
| ) |
Solve the 2x2 linear hyperbolic GLM-MHD system given by the divergence cleaning approach. Build new states VL and VR for Riemann problem. We use Eq. (42) of Dedner et al (2002)
| [in,out] | state | pointer to a State_1D structure |
| [out] | VL | left-interface state to be passed to the Riemann solver |
| [out] | VR | right-interface state to be passed to the Riemann solver |
| [in] | beg | starting index of computation |
| [in] | end | final index of computation |
| [in] | grid | pointer to array of Grid structures |
The purpose of this function is two-fold:
The following MAPLE script has been used
Definition at line 24 of file glm.c.

Include the parabolic source term of the Lagrangian multiplier equation in a split fashion for the mixed GLM formulation. Ref. Mignone & Tzeferacos, JCP (2010) 229, 2117, Equation (27).
Definition at line 139 of file glm.c.


 1.8.10
1.8.10 
